
RCS 発表論文 No.003
2.4GHz帯を用いた場所検知システムの開発
Development of a Positioning System working on the 2.4GHz Band
1. はじめに
近年、GPSによる位置の検知システムが急速に普及しており、携帯電話機にもGPS受信機が組み込まれている。しかし、GPSの受信範囲は屋外に限られており、位置の検知精度も日々改善がなされているが数m止まりである。*1 *2 屋内あるいは屋外を問わず、歩行者が現在居る場所を高精度で検知する技術は、例えば、バリアフリー道路を安全に歩行する場合などには、必要な技術であり、GPSによる位置検知システムを補完するものとして開発が期待されている。 場所コードで変調された2.4GHz帯の電波を放射する電波マーカをエリア内に散的に設置し、携帯端末によって受信することで、電波マーカの真下および近傍での位置を±10cmの精度で検知することを目標に試作機による実験を行ったので報告する。
2. 採用する測位アルゴリズム
GPSでは、地球の周回軌道上を移動する複数の衛星からの電波を受信し、双曲線航法によって位置を検知している。この方法では、同時に4局以上の衛星からの電波が受信できる必要があり、ビルの陰あるいは屋内では条件を満たす範囲が限定される問題点がある。 一方、今回採用した方法では、GPSの衛星局に相当する電波マーカを歩行者の頭上に設置し、当該電波マーカに搭載された4基のアンテナを周期的に切替えることで4局の衛星局に相当する電波を発信する。4基のアンテナは、お互いに4分の1波長の間隔で配置されており、歩行者が携帯する携帯端末において各アンテナから発信される電波の搬送波および変調信号の位相差を測定することで、当該電波マーカの真下からの距離の偏移を算出することで、歩行者が現在居る場所を検知するものである。
3. システムの概要
3-1 方向と距離を測定する基本技術
筆者らは、11th World Congress on ITS Nagoya, Aichi 2004, Japanにおいて、方向と距離を測定するための基本技術について発表を行っている。*3 本稿は、複数のアンテナを用いて方向を測定する技術*4 と上記の基本技術とを応用して、歩行者が現在居る場所を高い精度で検知しあるいは歩行を誘導するためのシステムに関するものである。
3-2 電波マーカと携帯端末の構成
電波マーカの構成を図3-2-1に、携帯端末の構成を図3-2-2に示す。
電波マーカは、ZigBee(センサネットワーク)用の送受信機チップを用い、基準発振器に同期して4基のアンテナを切替えながら場所を表すコードを含む2.4GHz帯の電波を発信している。
携帯端末側には1基のアンテナを接続して電波マーカからの電波を受信し、制御部において、当該受信した電波の搬送波および変調信号あるいは拡散符号の位相を電波マーカの4基のアンテナを切替える周期に合わせて測定し、アンテナ間の位相差を算出する。 複数の電波マーカがエリア内に離散的に配置されるため、バースト状に送信する際に複数の電波マーカが同時に発信するのを避けるようZigBeeによる制御手順を活用する。
3-3 電波マーカの設置方法と検知精度
図3-3-1に、電波マーカと携帯端末の位置関係を示す。
本配置では、電波マーカに組み込まれた4基のアンテナの指向性を下方に向けている。ここで、携帯端末の高さを約1mとし、電波マーカがその上方H(m)の位置に設置されているものとする。 携帯端末において、方向を検知する精度の目標値を90%の確率で±1°とし、電波マーカの真下からの距離をL(m)、検知した場所をL±⊿L(m)とすると、検知精度±⊿Lは、
から求められるので、結果を表3-3-1に示す。
| L=0m | L=1m | L=3m | L=5m | |
|---|---|---|---|---|
| H=1m | ± 1.7cm | ± 3.6cm | --- | --- |
| H=2m | ± 3.5cm | ± 4.4cm | ±11.6cm | --- |
| H=3m | ± 5.2cm | ± 5.8cm | ±10.6cm | ±20.4cm |
| H=5m | ± 8.6cm | ± 9.0cm | ±12.0cm | ±17.8cm |
4. 予想される問題点と解決策
4-1 マルチパスおよびハイトパターン対策
屋内での閉じられた空間あるいは屋外でのビル陰等では、床面、道路面あるいは周辺からの反射により、マルチパスあるいはハイトパターンにより方向の検知に大きな誤差を生じる場合がある。対策として、電波マーカに組み込まれた4基の円偏波指向性アンテナを周期的に切替えながら電波を発信し、これらの4基のアンテナと携帯端末間の相対距離を検出し、相対距離が比較的に短かく検出されたアンテナからの電波を選択して用い方向を検知する。
4-2 電波マーカ設置台数の削減策(将来計画)
電波マーカを屋内に設置してしかも高精度で場所の検知を行なうためには、5mメッシュで設置する必要がある。電波マーカ自体は、集積化をすれば小型化が可能であり、照明器具等に併設すれば容易に設置することができるが、設置台数が極端に増えることでコスト高となる。電波マーカの設置台数を削減するためには、電波マーカを基準点とし、慣性航法によって補完をすれば、電波マーカを50mメッシュにまで広げて設置することができ、場所の検知精度も±30cmが実現可能と考える。
5. 機能設計
5-1発信する電波の構成
電波マーカが発信する電波には、図5-1-1に示すように、(1)システム同期信号、(2)場所コード(UCODE)、(3)アンテナ情報、および(4)測定信号の4種類を設ける。
- システム同期信号:プリアンブル信号と同期信号で構成する。
- 場所コード(UCODE):場所毎に、統一基準により割り当てられる。
- アンテナ情報:基点となるアンテナ番号、アンテナ方向、およびその傾斜角度等を含む。
- 測定信号:方向と相対距離を測定するための信号で構成され、図5-1-2に示すように、基点となるアンテナを順次選択し、東南西北の4基のアンテナを切替えながら送信する。
5-2 電波の発信間隔
電波マーカの消費電力を削減するために、携帯端末からの場所検知要求を受信した場合に限り、ZigBeeの制御手順により周辺局と競合が生じないように、25ms(可変)の周期で約2ms間送信機を起動して電波を発信する。
5-3 方向と相対距離の測定
図5-3-1に示すように、電波マーカに、例えば東西南北の方向に、4基の円偏波指向性アンテナを4分の1波長(約3cm)の間隔で組込む。 Lm離れた電波マーカの4基のアンテナから携帯端末を見た方向を角度αとして測定すると、
となる。 ここで、⊿Lcmは、電波マーカに組み込まれた複数のアンテナの内、特定の2基と携帯端末との間の伝搬路長の差である。
特定の2基のアンテナ間で搬送波の位相差を測定し、位相差が⊿θであったとすると、
となる。 ここで、2.4GHz 帯ではλ=約12cmであるので、
となり、測定可能範囲-π/2<⊿θ<π/2において、角度α=⊿θラジアンとなり、電波マーカの方向が検知できる。 位相差⊿θの測定能力は、10ビットのA/D変換器を用いるとして、±(90°/512)≒±0.2°程度である。
誤差の原因には、この他に、電波マーカの送信機及び携帯端末の受信機の位相ジッタによる位相測定の誤差が加算される。 相対距離を測定する場合には、電波マーカに組み込まれた特定の2基のアンテナ間で発信される変調信号あるいは拡散符号の位相差⊿Φを測定する。 距離差を⊿Lmとすると、
から求められる。ここで、C=光速、freq=変調信号あるいは拡散符号の周波数(チップ数/2)である。
5-4 位相差の測定と演算
電波マーカ側の基準発振器と携帯端末側の基準発振器の間で発振周波数に違いが有ると、位相差演算の際に誤差が生じる。発振周波数の違いにより生じる誤差を軽減するために、以下の手順で位相差を測定し演算を行なう。 4基のアンテナを等間隔で切替えて8回分の位相データを取得し、測定時間の順に並べると表5-4-1のようになる。
#0と#1のアンテナ間の位相差をarcTanに変換した後に下記の演算を行なうと、
となる。
| 測定時間 | T0 | ・・・・・ | T7 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| #0 ANT | φ00 | ・・・・・ | φ70 | ||||||
| #1 ANT | φ01 | ・・・・・ | φ71 | ||||||
| #2 ANT | φ02 | ・・・・・ | φ72 | ||||||
| #3 ANT | φ03 | ・・・・・ | Φ73 | ||||||
一方、#2と#3のアンテナ間の位相差をarcTanに変換した後に下記の演算を行なうと、
となる。
#0と#1のアンテナ間の位相差と#2と#3のアンテナ間の位相差は等価であるがアンテナの切替え順序が逆であるので、両者の差をとり2で割ると、Φ=(Φ01-Φ23)/2 から位相差の平均値が求められる。 上記の演算を行なうと、例えば、T0、T1、T2の時間の経過で、測定間隔当たり⊿φの位相誤差を生じるとすると、
となって位相誤差⊿φが打ち消される。 アンテナ#0→#1の方向をX軸とし、アンテナ#0→#3の方向をY軸とし、携帯端末が位置する方向を下記により検出する。
⊿Φ(Y)=(#1-#2)-(#0-#3) : Y軸に対する角度
⊿Φ(X45)=(#0-#2) :X軸に45°方向からの角度
⊿Φ(Y45)=(#1-#3) :Y軸に45°方向からの角度
5-5 場所の検知の方法
場所コードおよびアンテナ情報から取得した電波マーカの場所、電波マーカのアンテナの高さ、X軸の方向、X軸とY軸の傾斜角度などのデータおよび携帯端末のアンテナ高さ(デフオルト値1m)から、図5-5-1により携帯端末の現在の場所を検知することができる。 場所の検知は、標準として携帯端末側で行なうが、逆に、携帯端末から電波マーカの方向に測定信号を間欠的に発信し、電波マーカ側で携帯端末の場所を検知し、検知データをZigBeeによるセンサーネットワークあるいは無線LAN等のネットワークを経由してセンターのサーバに出力することができる。
図5-5-1から、
となり、電波マーカの真下の場所を(X1、Y1)とすると、携帯端末の現在の場所(Xx、Yy)は、
から検知できる。
6. 実験結果
6-1 実験に用いた機器の概要
実験に用いた試作機の外観を図6-1-1および図6-1-2に示す。

| 無線方式 | : | ZigBee |
| 周波数 | : | 2.4GHz |
| 変調方式 | : | オフセットQPSK |
| アンテナ数 | : | 4基 |
| 送信電力 | : | 0.03mW/MHz |
| 場所コード | : | 128bit |
| アンテナ情報 | : | 16bit |
| 発信間隔 | : | 25ms |
| バースト長 | : | 2ms |

| 無線方式 | : | ZigBee |
| 周波数 | : | 2.4GHz |
| アンテナ数 | : | 1基 |
| A/Dコンバータ | : | 10bit |
| サンプリング数 | : | 8回/アンテナ |
| データ数 | : | 32個/バースト |
| 位相測定 | : | 簡易積和演算 |
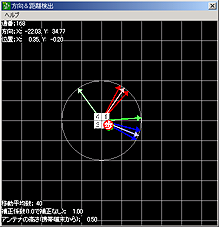
携帯端末で測定された位相データは、RS232Cインターフエイスを介してノートパソコンに出力され、ノートパソコンにより演算して場所の検知データとし、図6-1-3に例示するように、液晶画面上に表示される。
6-2 実験の方法
電波マーカを屋外の空地に4基のアンテナが下方を向くように設置し、携帯端末を電波マーカの下方の位置でアンテナが上方を向くように固定して設置した。 測定データは、携帯端末で電波マーカのアンテナ4基分を各8回、合計32回分を測定し、測定結果をアンテナ毎に平均をとり、ノートパソコンに伝送し、ノートパソコンにおいて時系列でデータを蓄積し、場所の座標に変換して移動平均を行なった後、結果を画面上に表示した。
6-3 実験結果
測定点を、図6-3-1に示すように、中心点および直径0.5mと1mの同心円上の9箇所に設定し、電波マーカの高さを携帯端末のアンテナ上1mとして測定を実施し、測定結果を表6-3-1に示す。
| 測定点 | 測定点の座標 | 検知した座標 | 検知精度(cm) | ||
|---|---|---|---|---|---|
| X (cm) | Y (cm) | X (cm) | Y (cm) | ① | 0.0 | 0.0 | 0.0 | 0.0 | - |
| ② | 0.0 | 25.0 | -9.5 | 29.9 | 10.7 |
| ③ | 25.0 | 0.0 | 27.8 | -8.8 | 9.2 |
| ④ | 0.0 | -25.0 | -3.8 | -34.1 | 9.9 |
| ⑤ | -25.0 | 0.0 | -35.2 | -2.7 | 10.6 |
| ⑥ | 0.0 | 50.0 | -5.3 | 52.8 | 6.0 |
| ⑦ | 50.0 | 0.0 | 43.8 | 5.3 | 8.2 |
| ⑧ | 0.0 | -50.0 | 3.8 | -59.1 | 9.9 |
| ⑨ | -50.0 | 0.0 | -50.5 | 6.6 | 6.6 |
7. 実験結果の考察
採用したZigBee用チップの位相ジッタが予定より大きかったために搬送波の位相測定は別の受信機を用いて行なった。また、符号変調方式の関係から相対距離の測定によるマルチパス対策を採用することができなかった。 測定結果は、目標値には到達できなかったが、1箇所の特異点を除き検知精度±20cmが実現できた。当該特異点は、マルチパスの影響の他に、電波マーカのアンテナ以外の場所からの電波の漏洩等が原因と考えられる。今後、これらの問題点に対する対策を採ることで目標値を達成できる見込みである。
8. むすび
本稿では、2.4GHz帯を用いた電波マーカをエリア内に離散的に設置し、当該電波マーカからの電波を受信することで、高い精度で場所を検知するシステムについて、理論的な考察と試作機を用いた実験結果について報告した。 位相差の測定では、リアルタイム性を重んじてDSPを用いないでプログラマブルロジックによる積和演算器を採用したため、アンテナ毎の位相測定の回数が少なく、即動性はあるが誤差の原因になっている他、マルチパス対策および電波のアンテナ以外の場所からの漏洩対策などの課題が残されており、今後とも引き続き改良を重ねることで、当初の目標である±10cmの精度に到達できる見通しが得られた。
参考文献
- Elliott D. Kaplan, UNDERSTANDING GPS PRINCIPLES AND APPLICATION, ARTECH HOUSE, INC., 685 Canton Street Norwood, MA 02065, 1996
- Bradford W. Parkinson and James J. Spilker Jr., Global Positioning System: Theory and Applications Volume 1 and 2, American Institute of Aeronautics and Astronautics, Inc., 370 L'Enfant Promenade, SW, Washington, DC 20024-2518, 1996
- Hironori Kawano, and Minori Kawano, Development of a Pedestrian Navigation System working on the 2.4GHz Band, 11th World Congress on ITS Nagoya, Aichi 2004, Japan
- Yasuhito Musiaki and et al, ANTENNA ENGINEERING HANDBOOK, OHMSHA, Shibakoen 3-5-8, Minatoku, Tokyo, Japan, 1986, pp502~504